Boyko Stoimenov - Research

- B.L.Stoimenov :
- Home :
- Research :
- Programming :
- (Un)Useful :
Summary
I (as most of us do) do both fundamental and applied research. With my fundamental research efforts I try to advance our knowledge about the mechanisms of sound generation by friction. It has obvious applications to reducing machine noise, but I can also see potential for application to surface condition assessment. My applied research efforts are focused on designing new devices and mechanisms made of soft polymer actuators, which were not possible with the materials and building blocks traditionally available to mechanical engineers. These applications, in turn, raise many unsolved fundamental problems related to the design of active compliant mechanisms.Soft actuator research Frictional sound research
Electro-active polymer ("artificial muscle") research for biomimetic robots
In comparison to human made machines animals move more efficiently and more silently. This mainly comes from the properties of the actuators that Nature uses - the biological muscle. Electro-active polymers are the closest man-made analogue of biological muscle. That is why they are often dubbed "artificial muscles". Being flexible is one of their most attractive features. This makes them suitable to mimic the soft natural motion of living organisms ("soft robots") and they hold promise for a new type of active compliant mechanisms, which were not possible with traditional hard-cased actuators.Soft polymer actuator, which can actuate into complex shapes
Typically, an IPMC bends with approximately constant curvature when voltage is applied to it. More complex shapes were achieved in the past by pre-shaping the actuator or by segmentation and separate actuation of each segment. There are many applications for which fully independent control of each segment of the IPMC is not required and the use of external wiring is objectionable. We used two core technologies to create an IPMC, which can actuate into a complex curve. The first is a conductive through-polymer connection between adjacent segments, which enables opposite curvature. The second one is variable overlap of opposite charge electrodes, which enables bending with any fraction of the full bending ability under given electrical input. This new technology is very useful in realizing without external wiring the bistable compliant structure described below and the linear actuator, which is based on it.Bi-stable compliant smart structures
Along with many desirable properties, soft polymer actuators typically also exhibit relaxation and drift. To overcome this, we have designed and patented a self-actuated (internally actuated) bi-stable beam structure, which utilizes the compliance of the material to form two stable states. It can be actively controlled to switch between the states by applying external voltage (but not external force) to the structure. It can maintain its last state even if power is switched off. Potential applications include Braille displays, micro-switches, micro-positioning mechanisms, etc.
Linear Ionic Polymer-Metal Composite (IPMC) actuator
Many of the electro-active polymers act as bending actuators, while biological muscle is a linear actuator, which exerts force when contracting. Our novel linear actuator made from a single Ionic Polymer-Metal Composite (IPMC) strip better mimics the action of biological muscle and opens the way for successful application of the electro-active polymers as artificial muscles. It is based on the linear deformations of a buckled beam and there is no need for mechanical joining of separate actuators – a disadvantage of previous linear actuator designs. The non-rotating nature of the end fixing in the double-clamped buckled beam also means that joining multiple elements to increase displacement or force is trivial.Improving the response by anisotropic surface roughening
Surface modification is an excellent method to achieve some desired change of object properties without altering its shape. By applying directional (anisotropic) roughness on the surface of an ionic polymer metal composite (IPMC) actuator, its bending response is improved more than twice. It also keeps the rigidity of the polymer in the plane perpendicular to the direction of bending. This is very helpful for improving the payload capacity and the locomotion speed of our undulatory swimming robot (see here and more detail in Japanese here).
Frictional sound and tribology research
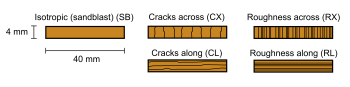
Friction noise in various machines is a serious problem, but certainly not all friction-generated sound is noise - remember the violin. Past research has been focused mainly on generation mechanisms such as "stick-slip", but my focus is on clarifying the role of roughness in what can be termed "roughness sound" or "roughness noise".Surface roughness, contact stiffness and frictional sound
Surface roughness is an important factor influencing the contact interface. I studied its effect on frictional sound and it found that it affects not only the amplitude of sound, but also the frequency. Rough surfaces produce sound with low peak frequency, while for smooth surfaces the peak is high. This peak frequency is unaffected by rubbing speed. These observations agree qualitatively with increase of the contact stiffness with reduced roughness, which can be predicted by the Greenwood-Williamson contact model.
Surface information from frictional sound
As sound generated during sliding carries information both about the structure and the condition of the contact, it can be used for contact condition monitoring. Indeed, for the most part of the last century, music and sound were encoded on vinyl records by prefabricated microgrooves on their surface. But I have shown that changes to the surfaces due to wear during sliding can also be detected by audible sound. I found very good correspondence between surface damage and sound pressure spikes generated in a single pass sliding. The spikes in the sound pressure were much more sensitive than the friction force information obtained from strain gauges.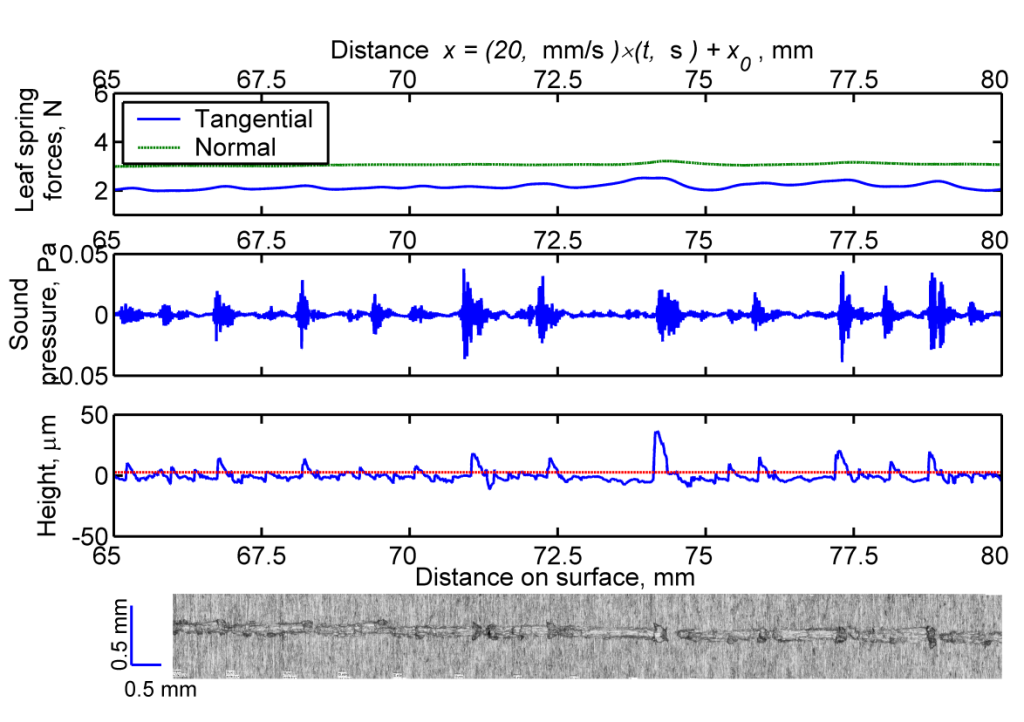
Radiation efficiency of a tribo-system.
When two surfaces are rubbed together, the material of each part plays a double role - on the one hand it affects the contact interface and fiction, on the other hand its elasticity and internal damping affect the dynamic properties of the system. I applied the concept of “radiation efficiency” to tribo-systems, which compares the real sound radiated from a tribo-system to an idealized reference source, which has the same level of mechanical vibration. For several materials, I could determine how much of the change of sound was due to change of surface properties and how much due to change of propagation and radiation from the structure.
 日本語
日本語 ... artificial muscles, ... is the moniker for electro-active polymers (EAP). ( Y. Bar-Cohen)
Biomimetic (sometimes bio-mimetic) refers to human-made processes, substances, devices, or systems that imitate nature. The art and science of designing and building biomimetic apparatus is called Biomimetics, and is of special interest to researchers in nanotechnology, robotics, artificial intelligence (AI), the medical industry, and the military. (Whatis.com)
Ionic polymer metal composite (IPMC) is an electro-active polymer material. It consists of an ion-conductive polymer membrane swelled with water and coated with thin metal electrodes on both sides. Under voltage the actuator bends.
Tribology is the science and technology that studies the interaction of surfaces in contact. More commonly, it studies friction, wear and lubrication.
Tribo-system is a system of elements in sliding, rolling or static contact.
(Audible)noise is displeasing human or machine created sound. (Wikipedia)
Sound is a disturbance of mechanical energy that propagates through matter as a longitudinal wave. (Wikipedia)